Deep Inertial Poser: Learning to Reconstruct Human Pose from Sparse Inertial Measurements in Real Time
2018-10-16
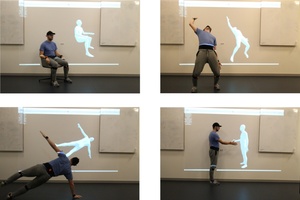
This is the code for our SIGGRAPH Asia 2018 project
| Author(s): | Yinghao Huang and Manuel Kaufmann and Emre Aksan and Michael J. Black and Otmar Hilliges and Gerard Pons-Moll |
| Department(s): |
Perceiving Systems |
| Publication(s): |
Deep Inertial Poser: Learning to Reconstruct Human Pose from Sparse Inertial Measurements in Real Time
|
| Authors: | Yinghao Huang and Manuel Kaufmann and Emre Aksan and Michael J. Black and Otmar Hilliges and Gerard Pons-Moll |
| Release Date: | 2018-10-16 |
| Repository: | https://github.com/eth-ait/dip18 |
| External Link: | http://dip.is.tuebingen.mpg.de/ |