Efficient Learning on Point Clouds With Basis Point Sets
2019
Conference Paper
ps
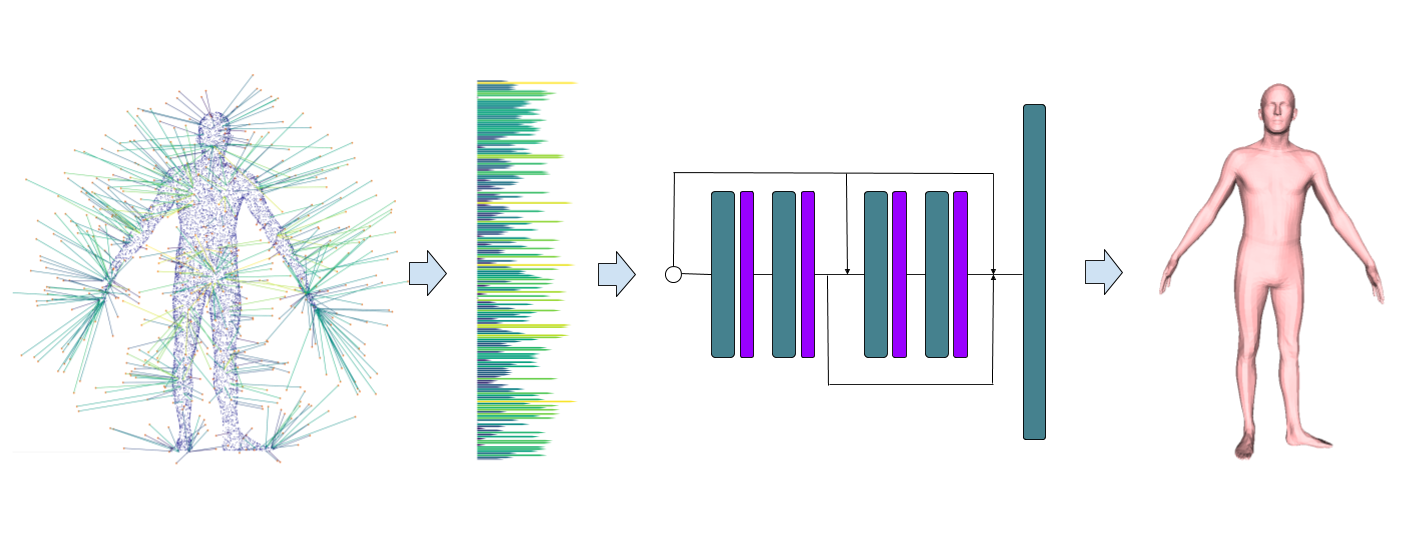
With an increased availability of 3D scanning technology, point clouds are moving into the focus of computer vision as a rich representation of everyday scenes. However, they are hard to handle for machine learning algorithms due to the unordered structure. One common approach is to apply voxelization, which dramatically increases the amount of data stored and at the same time loses details through discretization. Recently, deep learning models with hand-tailored architectures were proposed to handle point clouds directly and achieve input permutation invariance. However, these architectures use an increased number of parameters and are computationally inefficient. In this work we propose basis point sets as a highly efficient and fully general way to process point clouds with machine learning algorithms. Basis point sets are a residual representation that can be computed efficiently and can be used with standard neural network architectures. Using the proposed representation as the input to a relatively simple network allows us to match the performance of PointNet on a shape classification task while using three order of magnitudes less floating point operations. In a second experiment, we show how proposed representation can be used for obtaining high resolution meshes from noisy 3D scans. Here, our network achieves performance comparable to the state-of-the-art computationally intense multi-step frameworks, in one network pass that can be done in less than 1ms.
| Author(s): | Sergey Prokudin and Christoph Lassner and Javier Romero |
| Book Title: | International Conference on Computer Vision |
| Pages: | 4332--4341 |
| Year: | 2019 |
| Month: | October |
| Department(s): | Perceiving Systems |
| Bibtex Type: | Conference Paper (conference) |
| Paper Type: | Conference |
| Event Place: | Seoul, South Korea |
| Links: |
code
|
|
BibTex @conference{Prokudin_2019_ICCV,
title = {Efficient Learning on Point Clouds With Basis Point Sets},
author = {Prokudin, Sergey and Lassner, Christoph and Romero, Javier},
booktitle = {International Conference on Computer Vision},
pages = {4332--4341},
month = oct,
year = {2019},
doi = {},
month_numeric = {10}
}
|
|