Home 3D body scans from noisy image and range data
2011
Conference Paper
ps
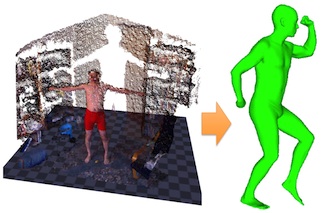
The 3D shape of the human body is useful for applications in fitness, games and apparel. Accurate body scanners, however, are expensive, limiting the availability of 3D body models. We present a method for human shape reconstruction from noisy monocular image and range data using a single inexpensive commodity sensor. The approach combines low-resolution image silhouettes with coarse range data to estimate a parametric model of the body. Accurate 3D shape estimates are obtained by combining multiple monocular views of a person moving in front of the sensor. To cope with varying body pose, we use a SCAPE body model which factors 3D body shape and pose variations. This enables the estimation of a single consistent shape while allowing pose to vary. Additionally, we describe a novel method to minimize the distance between the projected 3D body contour and the image silhouette that uses analytic derivatives of the objective function. We propose a simple method to estimate standard body measurements from the recovered SCAPE model and show that the accuracy of our method is competitive with commercial body scanning systems costing orders of magnitude more.
| Author(s): | Weiss, A. and Hirshberg, D. and Black, M.J. |
| Book Title: | Int. Conf. on Computer Vision (ICCV) |
| Pages: | 1951--1958 |
| Year: | 2011 |
| Month: | November |
| Publisher: | IEEE |
| Department(s): | Perceiving Systems |
| Research Project(s): |
Beyond Motion Capture
Bodies from RGB-D |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| Address: | Barcelona |
| Links: |
pdf
YouTube |
| Video: | |
| Attachments: |
poster
|
|
BibTex @inproceedings{Weiss:ICCV:11,
title = {Home {3D} body scans from noisy image and range data},
author = {Weiss, A. and Hirshberg, D. and Black, M.J.},
booktitle = {Int. Conf. on Computer Vision (ICCV)},
pages = {1951--1958},
publisher = {IEEE},
address = {Barcelona},
month = nov,
year = {2011},
doi = {},
month_numeric = {11}
}
|
|