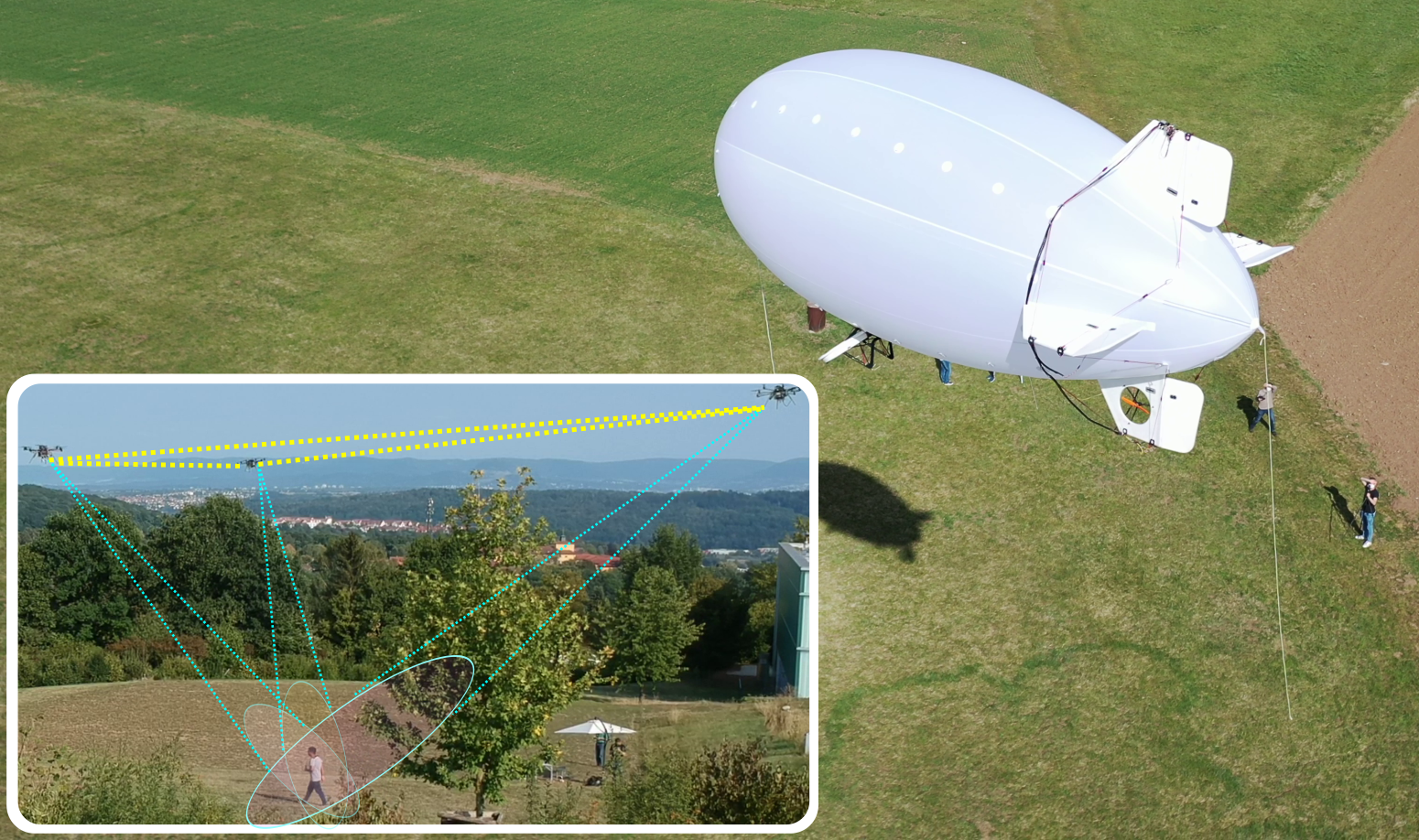
Perception-driven formation control of aerial robots tracking a person (inset). An autonomous blimp in flight, suitable for tracking animal subjects.
Flying mocap systems use aerial robots with on-board cameras that can localize and navigate autonomously. These robots must detect, track and follow the subject (human or animal) in real time. A key component of such systems is motion planning and control of multiple robots that ensures optimal perception of the subject while obeying other constraints, e.g., inter-robot and static obstacle collision avoidance.
We address this with decentralized convex model-predictive control (MPC) [ ]. The micro air vehicles (MAVs) actively compute local motion plans producing optimal view-point configurations, which minimize uncertainty in the tracked estimate. We achieve this by decoupling the goal of active tracking into a quadratic objective and non-convex constraints corresponding to angular configurations of the MAVs w.r.t. the person. We derive this decoupling using Gaussian observation model assumptions within the cooperative tracking algorithm [ ] [ ]. We preserve convexity in optimization by embedding all the non-convex constraints, including those for dynamic obstacle avoidance, as external control inputs in the MPC dynamics [ ]. We evaluate this with 3 MAVs in challenging scenarios.
Tracking animals is difficult with multi-rotor vehicles due to their noise and short flight time. Consequently, we developed a novel framework for modeling, simulation and control of helium-based blimps [ ]. This addresses several unique properties of blimps, such as, i) dynamic deformation in response to aerodynamic and control forces, ii) susceptibility to wind and turbulence at low airspeed, iii) variability in airship designs regarding placement, direction and vectoring of thrusters and control surfaces. Based on simulated wind and deformations due to changes in ambient pressure and temperature as well as helium leakage, we predict substantial effects on controllability, verified in real world flight experiments. We are currently developing formation control strategies for blimps, where we address their non-linear, non-holonomic and time-delayed dynamics.