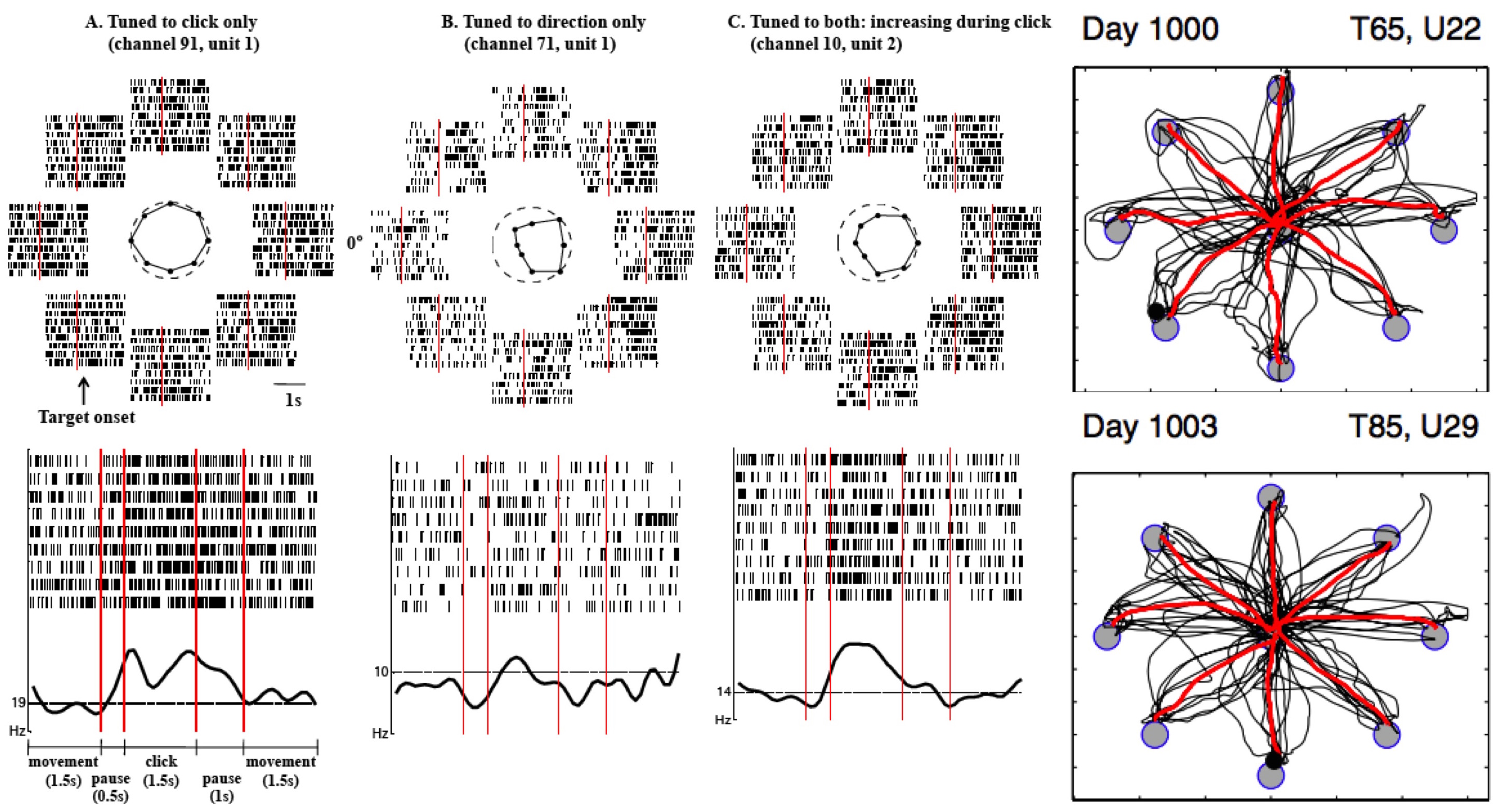
Left top (A-C): Firing of three different neurons in the brain of a paralyzed human. B and C show directional tuning. Left bottom (A-C): Firing rate of the same neurons as a function of imagined "clicking". A and C modulate with clicking. Right: Decoded trajectories in a center-out task from a population of motor cortical neurons in a human at around 1000 days after implantation.
We use motion capture together with electrode arrays, implanted in the motor cortex of monkeys, to learn how motor cortical activity relates to movement and to create new algorithms to decode this activity. Translating these models to paralyzed humans allows us to restore or improve lost function in people with central nervous system injury by directly coupling brains with computers, allowing people to control a computer cursor with their thoughts.
We developed a point-and-click intracortical Brain Computer Interface (iBCI) that enables humans with tetraplegia to volitionally move a 2D computer cursor in any desired direction on a computer screen, hold it still, and click on an area of interest [ ]. This direct brain-computer interface extracts both discrete (click) and continuous (cursor velocity) signals from a single small population of neurons in human motor cortex. Enabling this is a multi-state probabilistic decoding algorithm that simultaneously decodes neural spiking activity and outputs either a click signal or the velocity of the cursor. The algorithm combines a linear classifier, which determines whether the user is intending to click or move the cursor, with a Kalman filter that translates the neural population activity into cursor velocity. We present a paradigm for training the multi-state decoding algorithm using neural activity observed during imagined actions. We quantified point-and-click performance using various human-computer interaction measurements for pointing devices. We found that participants could control the cursor motion and click on specified targets, suggesting that signals from a small ensemble of motor cortical neurons (~40) can be used for natural point-and-click 2D cursor control of a personal computer. Furthermore in [ ] we showed that such devices could be used to decode intended cursor movement over 1000 days after implantation.
Our ongoing work focuses on developing new non-linear decoding algorithms [ ].